论文题目:四角粽柔性夹持结构设计与抓取试验研究
作 者:马威,刘新宇,金炜,张博文,崔政伟
第一作者:马威(1997),男,硕士研究生,研究方向为轻工机械
通信作者:崔政伟(1963),男,硕士生导师,研究方向为食品加工技术和装备
第一单位:江南大学机械工程学院,江苏无锡,214122
第二单位:江苏省食品先进制造装备技术重点实验室,江苏无锡,214122
基金项目:国家自然科学基金项目(11802105)
针对目前柔性夹爪手指弯曲扰度大,指尖接触性能差,难以实现四角粽指尖性抓取的问题,设计一种增强指尖型柔 性夹爪,并采用3D打印和浇铸成型技术制作柔性手指及其固定组件。测定半透明型硅胶(SJ3113)二阶Yeoh模型材料常 数并对手指弯曲变形进行有限元仿真预测与试验验证,进行粽子抓取及夹持力测试试验研究。结果表明:柔性手指具有良好的弯曲变形特性,仿真与试验结果基本一致;柔性夹爪气压在60~80 kPa时,夹持力为2.1~3.9 N,此时对粽子的夹持性能最优。该柔性夹爪结构简单且抓取成功率高,在机械手自动化分拣、包装粽子方面具有应用价值。
本文以100 g标准四角粽为抓取对象,其三维简化模型如图1所示。
多腔体型柔性手指采用超弹性材料制成,其变形原理如图 2 所示。
图2 多腔体柔性手指结构
柔性夹爪在实现抓取对象时有2种方式:一种是包络性抓取,另一种是指尖性抓取。粽子的形状不规则且棱角较多,采用包络性抓取难以实现粽子的整体包裹。经抓取试验验证,该抓取方式不可行。
指尖抓取主要通过指尖对物体表面施加压力,依靠其产生的摩擦力实现抓取操作。指尖抓取粽子难点在于手指接触粽子面积较少,导致指尖接触性能较差;并且随着手指弯曲扰度的增加,其指尖接触性能也会越来越差,影响柔性夹爪整体夹持性能。因此,需要针对手指进行结构改进和优化。
柔性手指结构如图3所示。采用3指节手指(不包括固定指节)制作柔性夹爪,以较短的手指长度降低手指弯曲扰度的影响,并通过柔性手指与刚性结构连接提高手指刚度,增强夹爪夹持能力。同时为提高手指指尖接触性能,对手指限制底层提出一种增强指尖结构。
图3 柔性手指结构
其设计优点:抓取时,增强指尖结构可以触及粽子底部缝隙,加大指尖与粽子底部接触面积,从而增强夹爪夹持能力;由于增强指尖结构为超弹性材料,具有弹性变形能力,所以随着手指弯曲扰度的增加,该结构可以与粽子底部自适应贴合,提高夹爪贴合效果与抓取稳定性。
三指夹爪主要由爪套和爪架构成,其具体结构如图4所示。爪套由爪套1和爪套2两个组件嵌套而成,将手指固定指节内嵌于爪套中,通过尼龙螺栓连接,用于固定手指和连接爪架。爪架顶部设有螺纹孔,可通过法兰与机械臂连接工作。考虑到制作成本和效率,三指组件均采用3D打印制作。
由于手指材料对手指弯曲特性和夹持性能的影响较为显著,所以综合考虑其拉伸强度、伸长率 和成本等方面,选择三景信德科技有限公司SJ3113型硅胶材料。
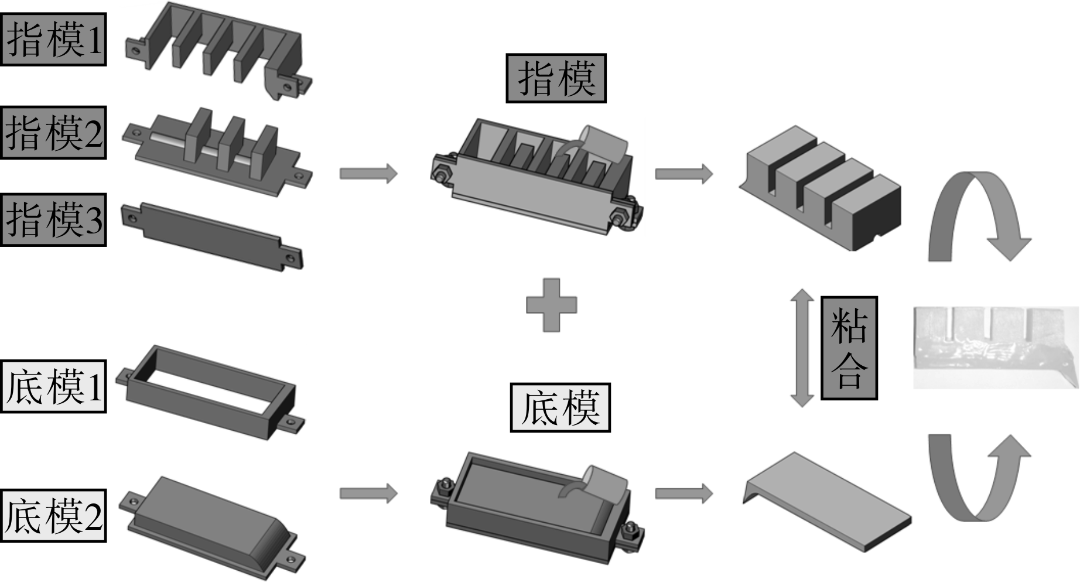
采用浇铸成型方法制作柔性手指,如图5 所示。以光敏树脂为原材料,通过3D 打印制作模具,模具可分为指模和底模。由于硅胶固化后容易产生粘模现象造成脱模困难,所以采用一种装配式模具方法来提高手指脱模效率。将指模分解成3部分,即指模1、指模2、指模3;底模分解为底模1和底模2。各部分均采用3D 打印制作并通过尼龙螺栓连接。
由于设计的柔性手指需要具备一定的变形能力,所以结合文献在材料本构模型上选择二阶的Yeoh 模型:

式中 C10,C20——硅胶材料Yeoh 模型材料系数。
对于Yeoh 模型材料系数C10,C20 的测定,一般采用单轴拉伸试验来获取。
将试验数据线性回归拟合成直线如图6 所示。
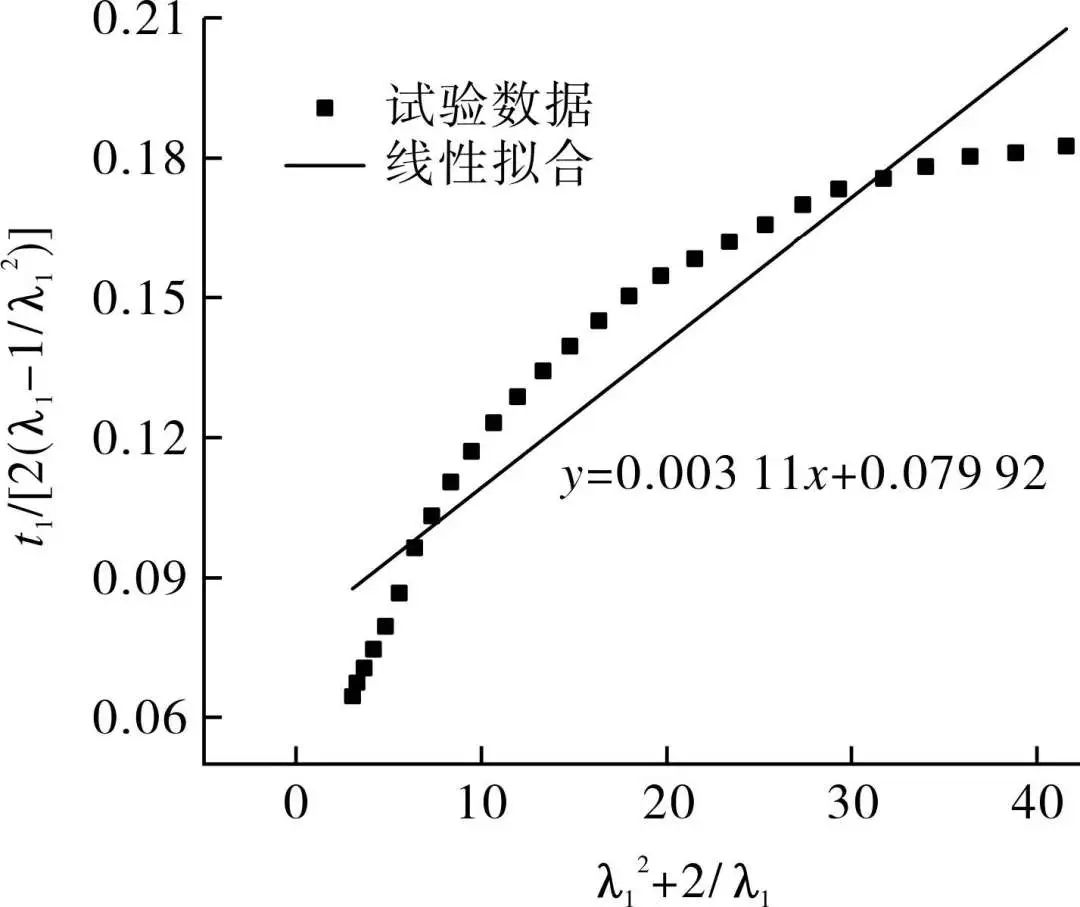
图6 二阶Yeoh 模型常数拟合曲线图
计算得:C10=0.09,C20=0.0016。
由于超弹性材料变形具有高度非线性,理论分析难以直观性表述,为此采用有限元软件对柔性手指弯曲变形进行仿真预测并试验验证。基于ANSYS Workbench 平台结构静力学模块,分析无负载作用下手指单向正压弯曲变形特性。
图7为50 kPa压力下手指变形云图,可以看出手指具备较大的变形能力。
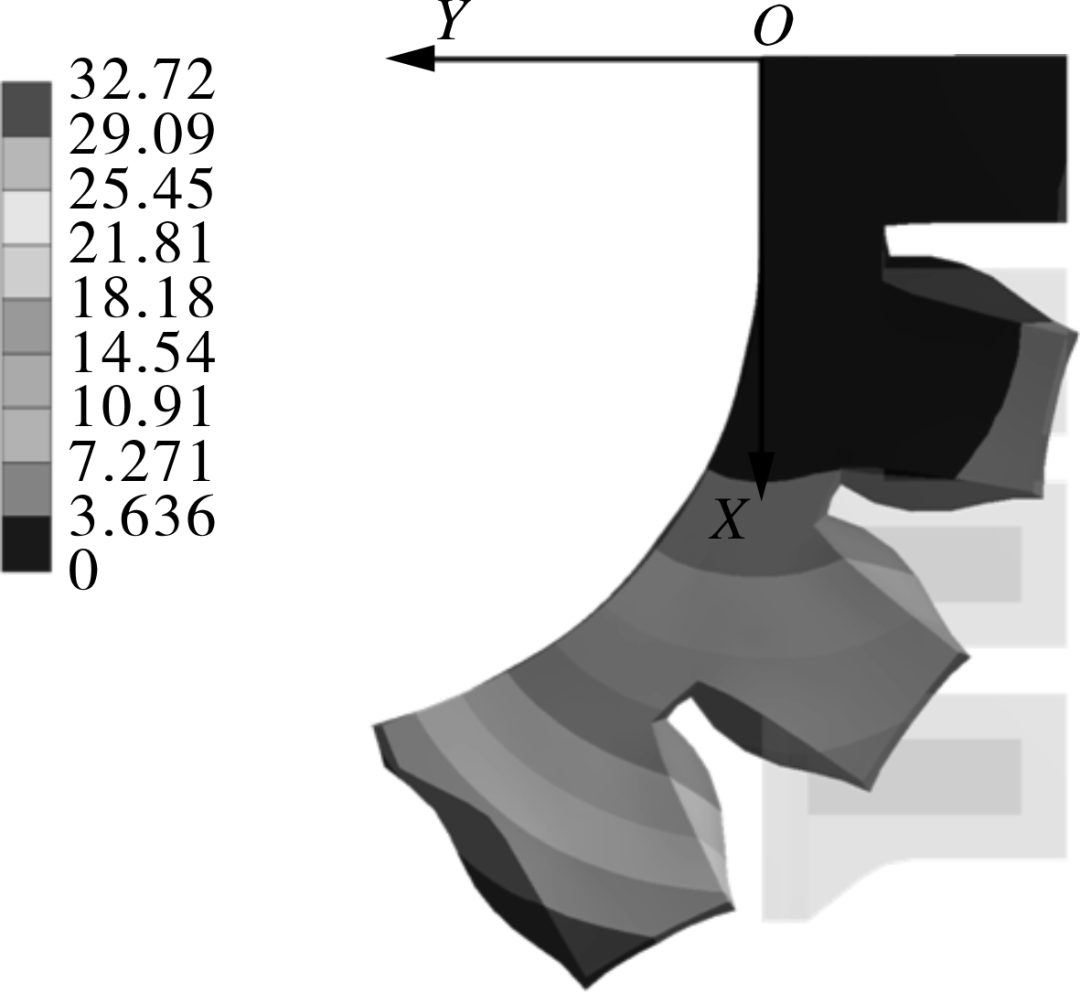
图7 50 kPa气压下手指弯曲变形
为分析手指弯曲变形特性并验证仿真结果的正确性,对手指内部分别施加20,40,60,80 kPa压力,得到模拟弯曲变形曲线;同时进行单指试验,测得同等压力下手指实际弯曲变形曲线。将模拟结果与试验结果进行对比。结果显示:随着气压的上升,手指弯曲变形更剧烈,手指弯曲基本呈常曲率圆弧特征并且具有良好的弯曲性能;仿真结果与试验结果总体变形趋势一致,其中试验结果变形大于仿真结果,但整体误差较小,在正常范围内。因此,建立的有限元模型能有效预测手指实际弯曲变形特性。
为测试手指指尖压力特性,设计手指压力测试平台如图8 所示。
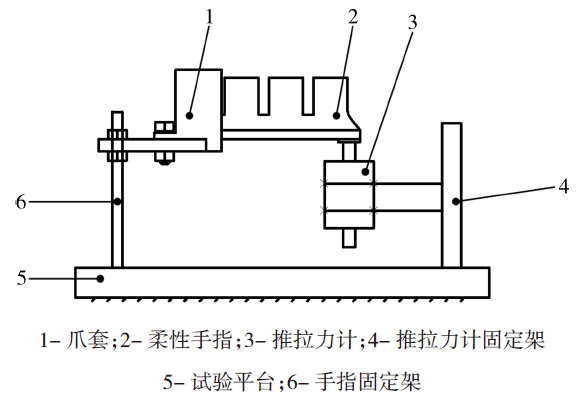
图8 指尖压力测试装置
试验结果如图9 所示。结果显示:手指指尖压力随气压变化基本呈线性增长趋势,气压在100 kPa 时手指指尖压力达到2.82 N。由此可知,设计的柔性手指具有良好的指尖力学性能,并且具备一定的抓取能力。
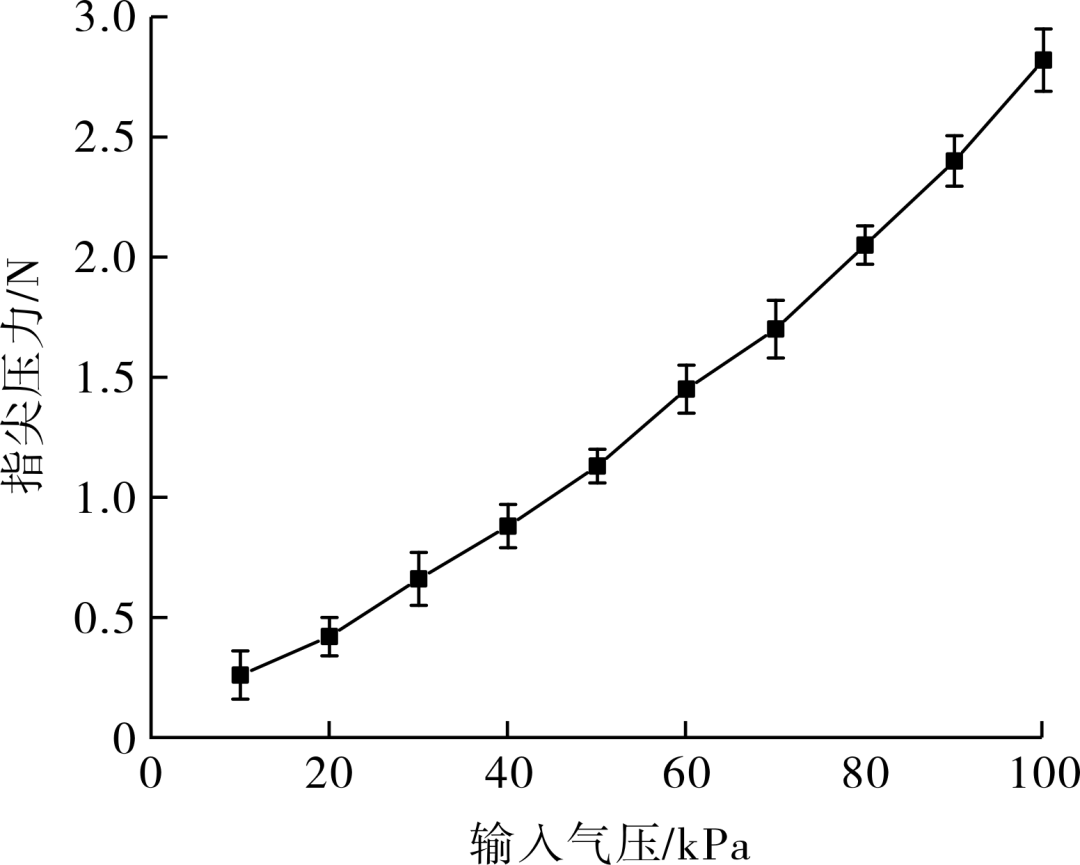
图9 气压与指尖压力关系
将粽子放置于抓取平台上,移动夹爪至指定位置进行抓取,粽子无掉落现象记为抓取成功。其中,测试气压范围为10~100 kPa,间隔10 kPa,每组气压测50次,测试结果如图10 所示。
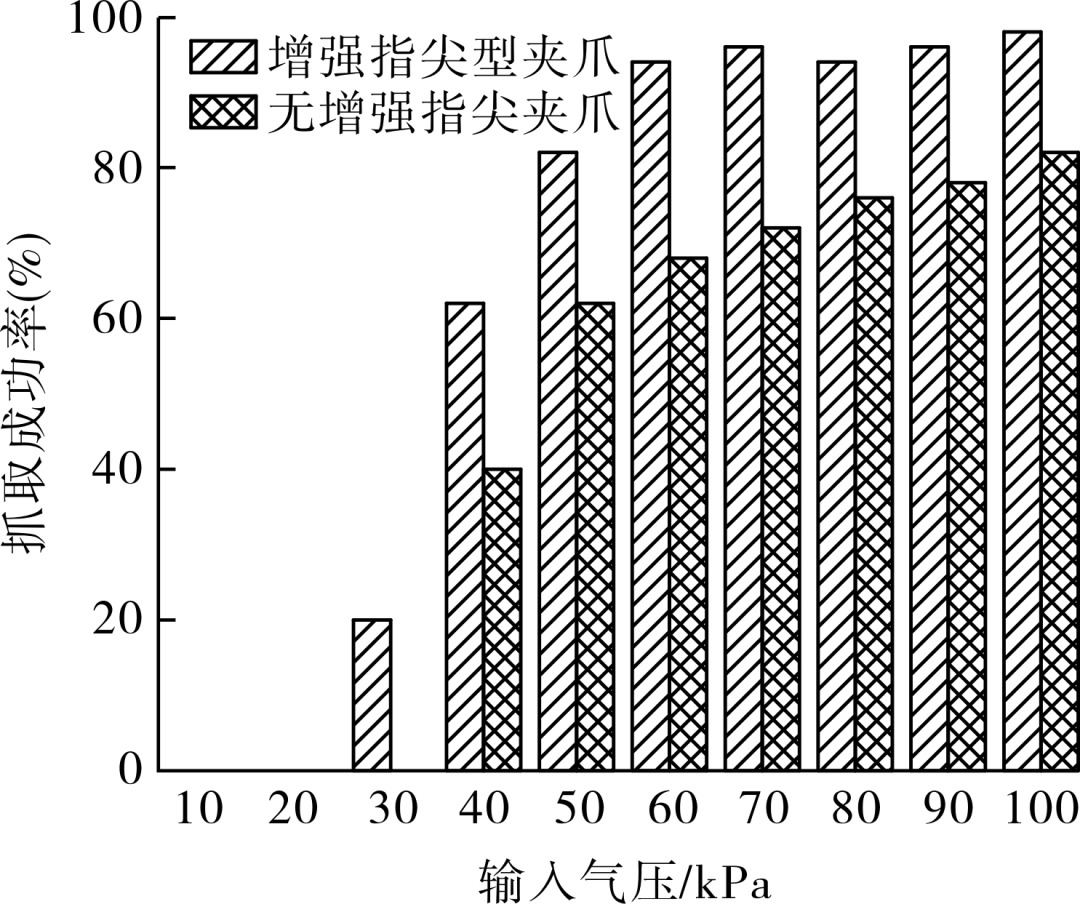
图10 柔性夹爪抓取成功率对比
抓取结果证明,设计的增强指尖结构是保证柔性夹爪高效抓取粽子的关键性结构,具有优异的抓取性能。
为测试夹爪对粽子夹持能力,设计粽子夹持力测试平台,如图11所示。
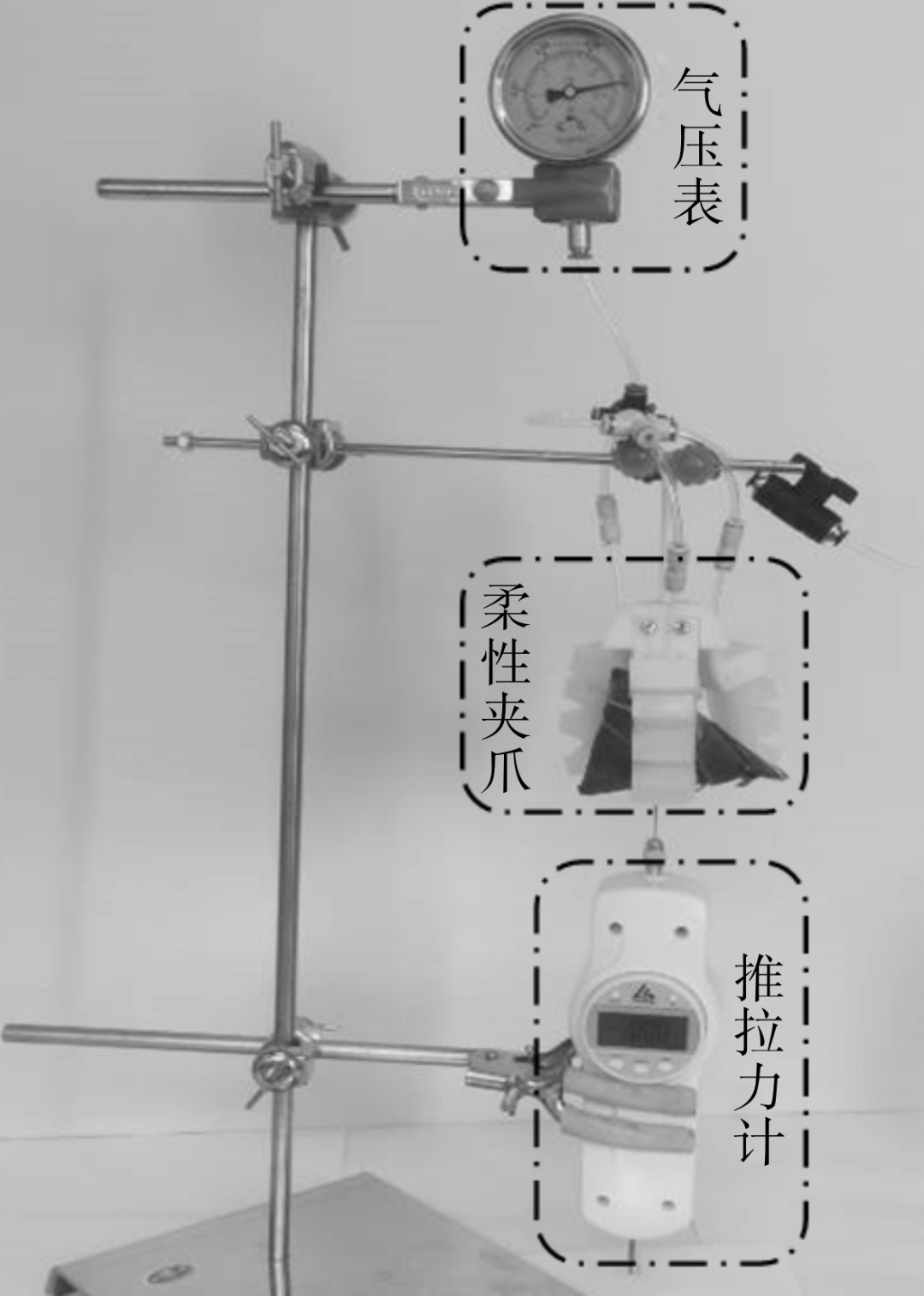
图11 夹持力实验装置图
经综合考虑柔性夹爪夹持能力以及抓取成功率,避免其内部气压过盈,最终确定柔性夹爪夹持性能最佳的气压范围为60~80 kPa,此时夹持力范围为2.1~3.9 N。
结语
(1)根据四角粽子三维几何特征以及指尖抓取方式,设计一种柔性三指夹持装置。其中包括增强指尖型柔性手指、三指爪架及其固定连接装置、装配式模具的设计,并采用 3D 打印、浇铸成 形等方法制作柔性夹爪。
(2)以SJ3113型硅胶作为柔性手指材料, 测定基于二阶Yeoh模型材料系数C10,C20,通过ANSYS软件对手指弯曲变形进行仿真预测并单指试验验证,试验与仿真结果基本一致。
(3)对柔性夹爪进行粽子抓取与夹持力测试试验,结果表明:柔性夹爪对粽子具有较高的抓取 成功率且具备一定的夹持能力,气压在60~80 kPa范围内夹持性能达到最佳。
本文设计的柔性夹爪结构简单,制作成本低廉,抓取成功率高,可为机械手自动化分拣、包装粽子等生产环节提供新思路与新方法,对于提高生产 效率以及降低劳动力成本具有重要研究意义。













